CO2-Messung mit dem MH-Z19B
Der CO2-Sensor MH-Z19B funktioniert auf Basis der nichtdispersiven Infrarottechnologie (NDIR) zur Messung der
CO2-Konzentration in der Umgebungsluft. Nichtdispersive Infrarotdetektoren (NDIR) messen die Absorption von Infrarotstrahlung bei einer fest eingestellten Wellenlänge (nichtdispersiv), die bei CO2 bei 4,3 µm liegt
Ein Fotodetektor im Sensormodul misst dabei die Absorption eines kurzen Lichtimpulses: Je weniger Licht ihn erreicht, desto höher liegt der Kohlendioxidgehalt.
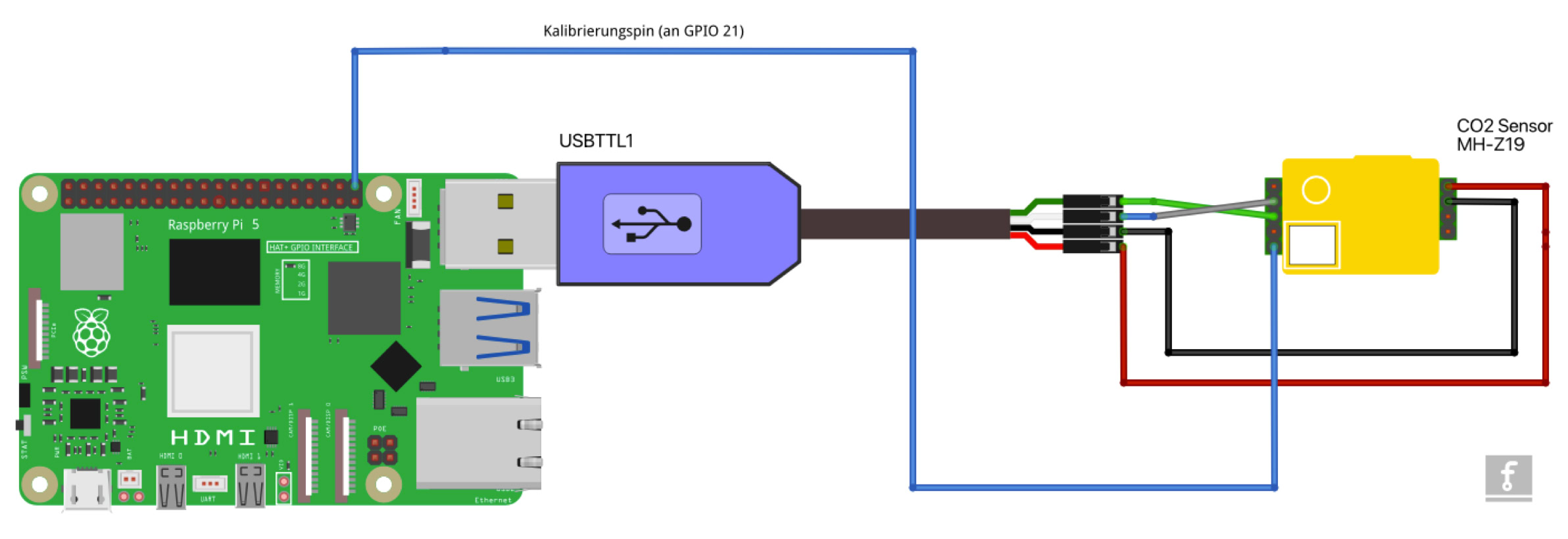
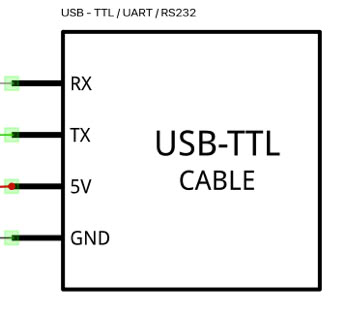
Der CO2-Sensor wird über USB-UART Wandler mit einem USB-Anschluss des Raspberry Pi verbunden (siehe Abb. 7). Laut Literatur ist die Messung über die UART-Schnittstelle genauer als über die PWM (Pulsweitenmodulation) Schnittstelle GPIO14 und GPIO15 am Raspberry. Letzteres hat auch nicht funktioniert. Deshalb wurde auf den USB-UART Anschluss gewechselt.
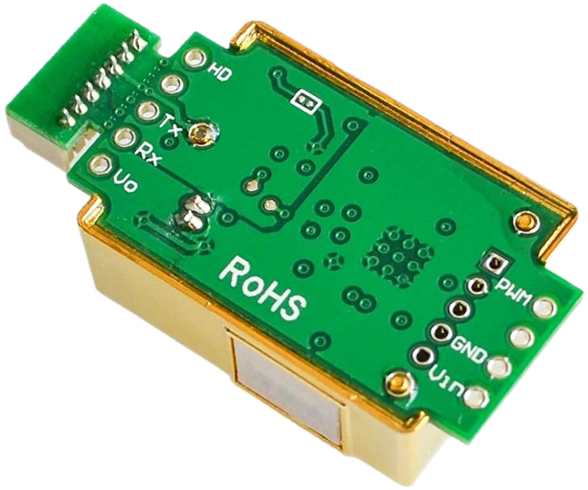
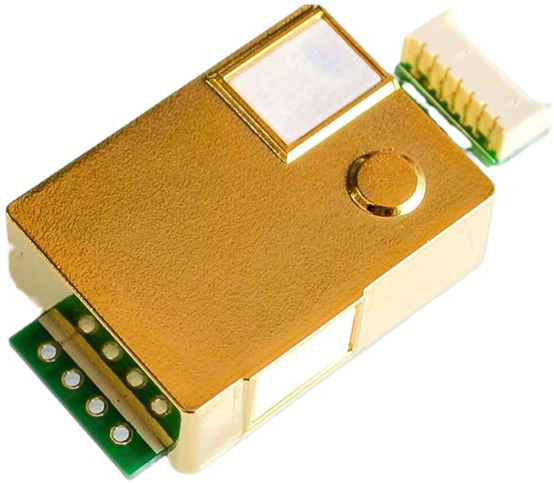
Die Anschlüsse am Sensor:
Stromversorgung:
GND
Vin (5Volt)
Datenpins:
TX
RX
HD (Kalibrierungspin)
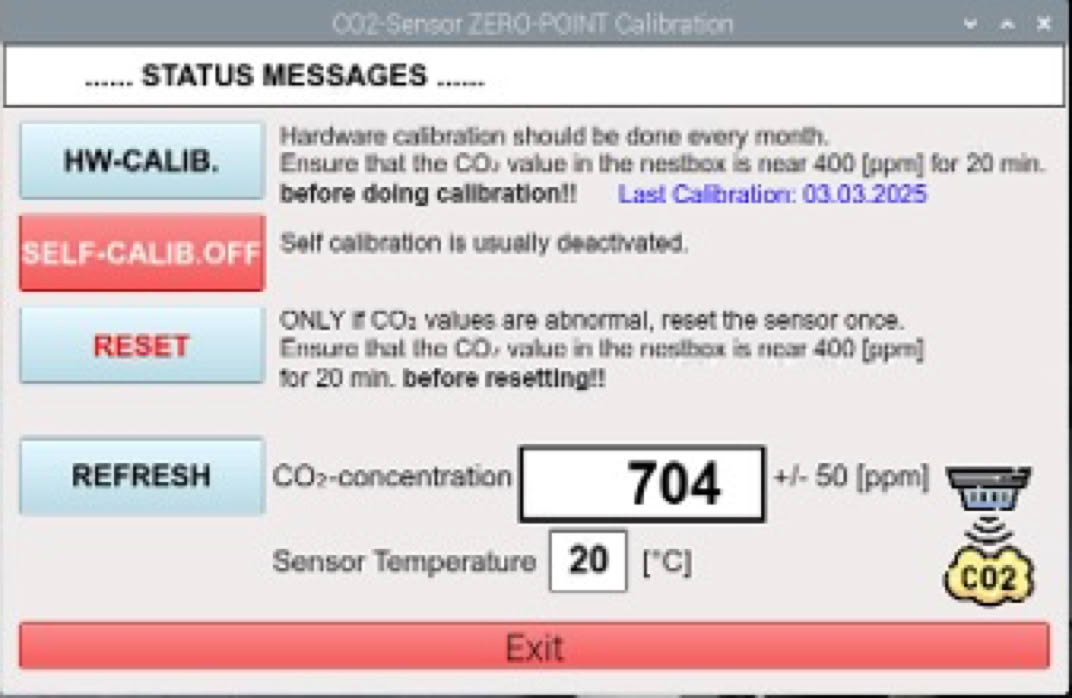
Zero-Point (Nullpunkt) Kalibrierung des CO2-Sensors:
Der Nullpunkt des Sensors liegt bei 400 ppm. Beim Kalibrieren teilt man dem MH-Z19B mit, dass er sich gerade in einer Kohlendioxid-Konzentration von 400 PPM befindet.
Er merkt sich dann den gerade anliegenden
Spannungswert und wird ihn als untere Grenze für die Berechnung der Messwerte verwenden. In der Eulenkamera Applikation wurde die Kalibrierung umgesetzt wie in Abb. 8 gezeigt.
Es gibt drei Methoden um den Sensor zu kalibrieren:
1. Self-Calibration (ABC-Calibration)
Laut Datenblatt ist die ABC Kalibrierung nur für völlig geschlossene Räume und nicht für Scheunen, Gewächshäuser etc. Die automatische Self-Calibration wurde in diesem Fall deaktiviert.
2. Hard-Ware Calibration
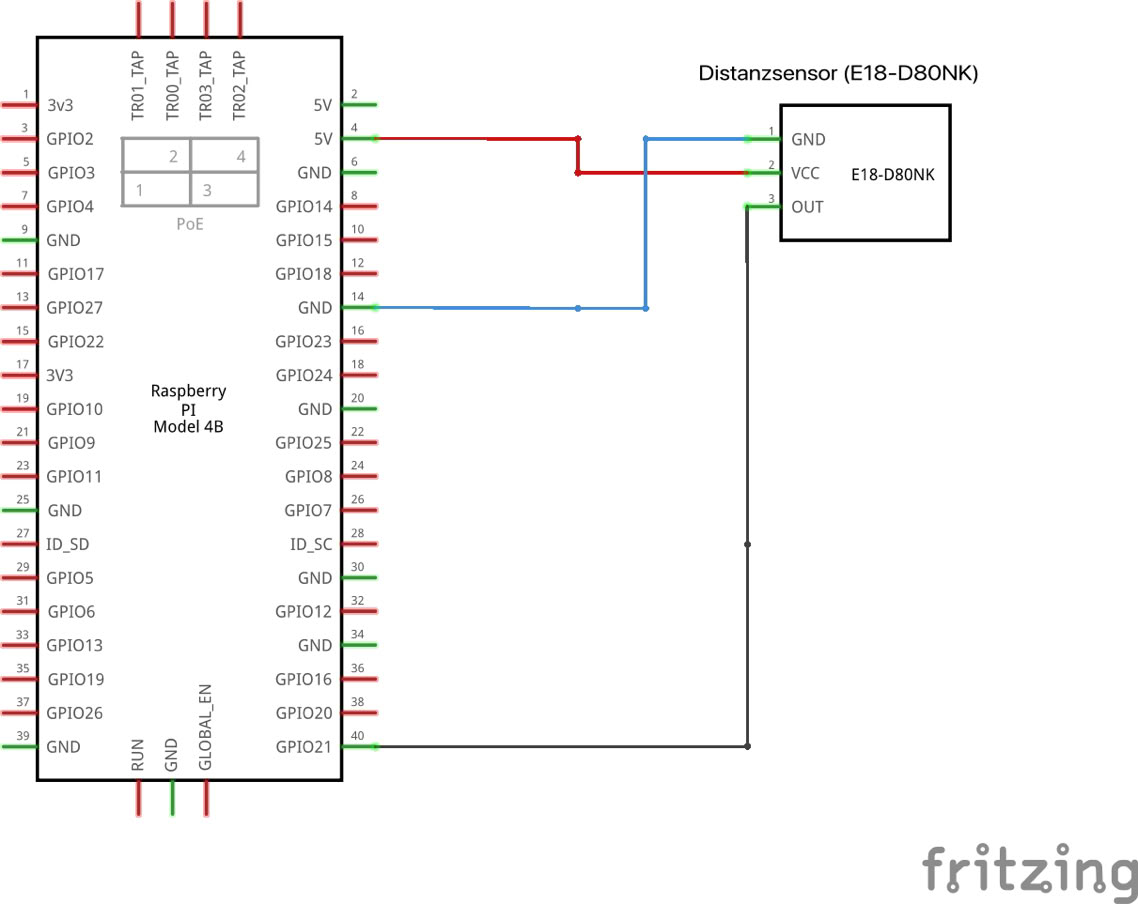
Bei der Hard-Ware Kalibrierung wird der Sensor fü 20 Sekunden über den HD Pin (GPIO 21) auf Masse gezogen und damit auf Null gesetzt. Die HW-Calibration sollte spätestens alle 6 Monate durchgeführt werden!
Und sollte auch gemacht werden, wenn der Raspi abgeschaltet war!
3. Software Calibration (RESET)
Ein Reset kann nötig sein, wenn der Sensor unrealistische bzw. völlig falsche Daten liefert – weil er vorher vielleicht nicht für 20 min bei konstant 400 ppm Umgebungsluft kalibriert worden ist.